We have identified the GrovePi as one of the best prototyping platforms for us to use in developing the FIoT suit. This is because
- It provides the best plug and play set of sensors we have seen
- It is Open Source
- The corresponding Raspian for Robots SD image provides a flexible easy to use starting point, including GUI wifi setup over peer to peer Ethernet, browser based VPN and terminal access, and Scratch integration.
To get started, there is a good in depth guide at https://www.dexterindustries.com/GrovePi/get-started-with-the-grovepi/ but it really only takes a few steps. Here is a short version that should get you up and reading sensor values in no time.
Quickstart
- Download the Raspian for Robots image and burn with Etcher
- Connect the Pi to the network your computer is connected to via Ethernet. (You can also connect directly to your laptop, but I haven’t tried that yet)
- Browse to http://dex.local/ and connect via VPN
That should get you up and running with the OS. To start reading sensor values (I have the Temperature&Humidity Sensor)…
Sensor reading
- Open Scratch, choose “GrovePi” from the first dropdown and “Start programming”
- Use these examples to pull a reading for your senor https://raw.githubusercontent.com/CleoQc/Utilities/master/Scratch_Commands/grovepi.png
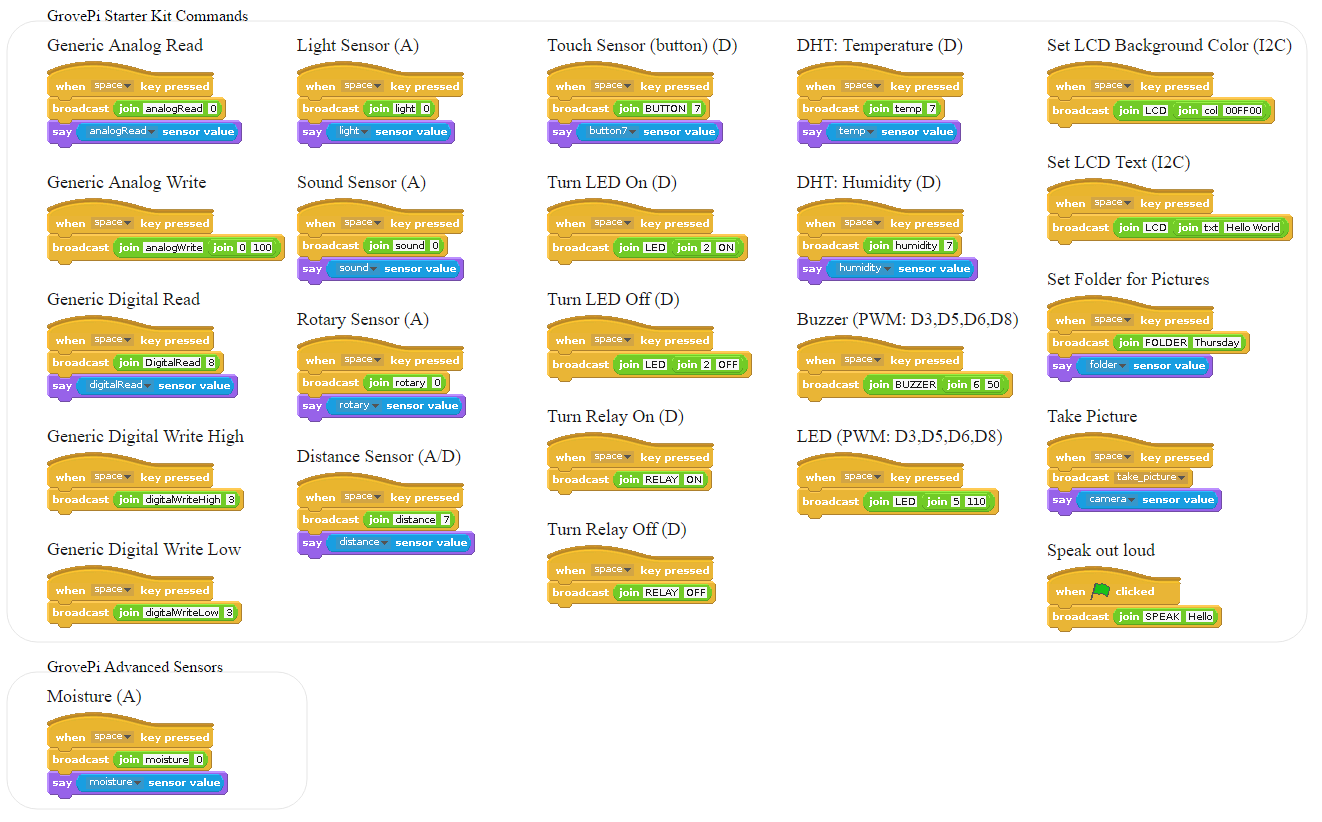{kind=link}